 Winfried Ritsch
Winfried Ritsch 
10 Minuten
The „Automatenklavierspieler“ aka „Autoklavierspieler“ is a playing mechanism, also known as a prefixer, that can be mounted on any conventional upright or grand piano.
The piano player automaton
A massive frame with 88 electromechanical fingers, which are moved by solenoids, is mounted on a keyboard. Controlled by micro-controllers, which are driven over a dedicated computer, the Autoklavierspieler can be controlled over Network, MIDI files, and real-time generated music. The Automat named "Kantor" has been constructed at the Atelier Algorythmics.1

Kantor-Prototyp, Erstbetrieb im CUBE am Institut für Elektronische Musik Graz, 2003.
Fascination music machines
In the context of the metaphor of materialism in the 18th century, Denis Diderot writes about the fascination of musical machines, especially the piano. "If only it had a selective and dynamic memory, it could play like a human player".2
Not only the technical possibilities, but also the spirit of the age and musical thinking were crucial for the development of music machines; equally crucial is compositional thinking for machine music."3
The perception of the piano as a machine, as described in the 18th century, makes the piano an instrument that is particularly suitable for automation.
The challenge
Peter Ablinger's basic idea was to create a phonorealism4 comparable in effect to photorealistic painting in the visual arts. Beyond the purely technical aspect of the "Quadraturen", further aspects must be considered that were relevant to the development of the automaton. His first experiments with analog whole-tone filters led him to the aesthetic principles of the Quadraturen series and the method of using the analysis data of recorded sounds as source material for his compositions.
This took him to one of the most challenging disciplines, using spoken language to reconstruct the spoken with instruments like the speaking piano.
It worked well in the computer simulation and sounded promising, so Peter asked me if a real player piano could do the same, and I naively said "Yes, why not". So we looked for a player piano that could play all keys simultaneously at different velocities.
The insufficient power supply turned out to be a major challenge, as it did not allow for the required number of parallel keys with different velocities. Furthermore, the repetition rate was often limited, mainly by the data bandwidth. A single MIDI5 connection was not fast enough. And so I had to build one, and that was the birth of the player piano.
The build
As a reference for the build, some player pianos have been analyzed and the idea of a robot piano player sitting in front of a piano, has been taken from the idea of Trimpins player piano.6 This fits also the performance purposes, since pianos are widely spread and hard to transport.

Millitron bei seiner ersten Performance in der Helmut Listhalle, Stadtoper Graz, 2008.
With new commissions, the need for dialogs in the compositions, and more performances in Europe, an additional better transportable Autoklavierspieler was needed, especially for the opera production ”Stadtoper” by Peter Ablinger. Millitron, as this one was named, could be optimized from previous experiences. It has half the weight, a dedicated micro-controller board, the "algopic" and "algofet"7, it played more precise, was better usable, especially for quiet pieces and therefore had a better "piano-forte" dynamics. Exchanging the use of a hold circuit, not using PWM Modulation during the hold phase of a key, eliminated the high-frequency noise from the solenoids.
In 2010 the music theatre production Maschinenhalle #18 required 12 pieces of the automata, and thus the first small series. A dance interface was also developed for this, and the series "Rhea" was created.
Rhea was developed with a focus on even faster repetition, better dynamics for pianissimo, easy transportation, and fast setup. The new electronics developed for this, should enable much finer calibration better adoption of old imprecise pianos, and easier control over Ethernet. Furthermore, Rhea should be the first series for reproduction as open hardware, enabling others to build and handle the robot piano player.
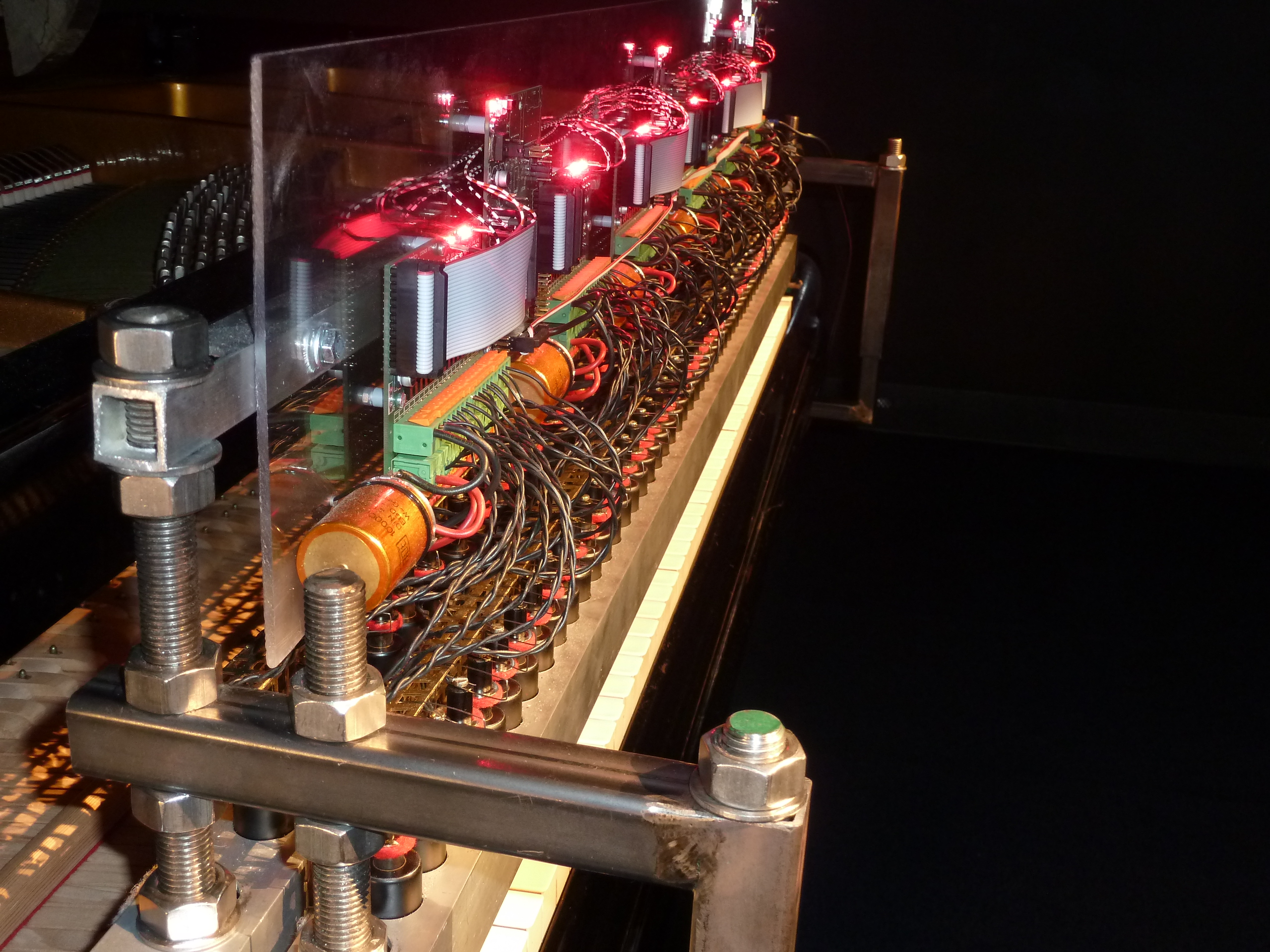
Rhea Autoklavierspieler 2010.
Finger Strike
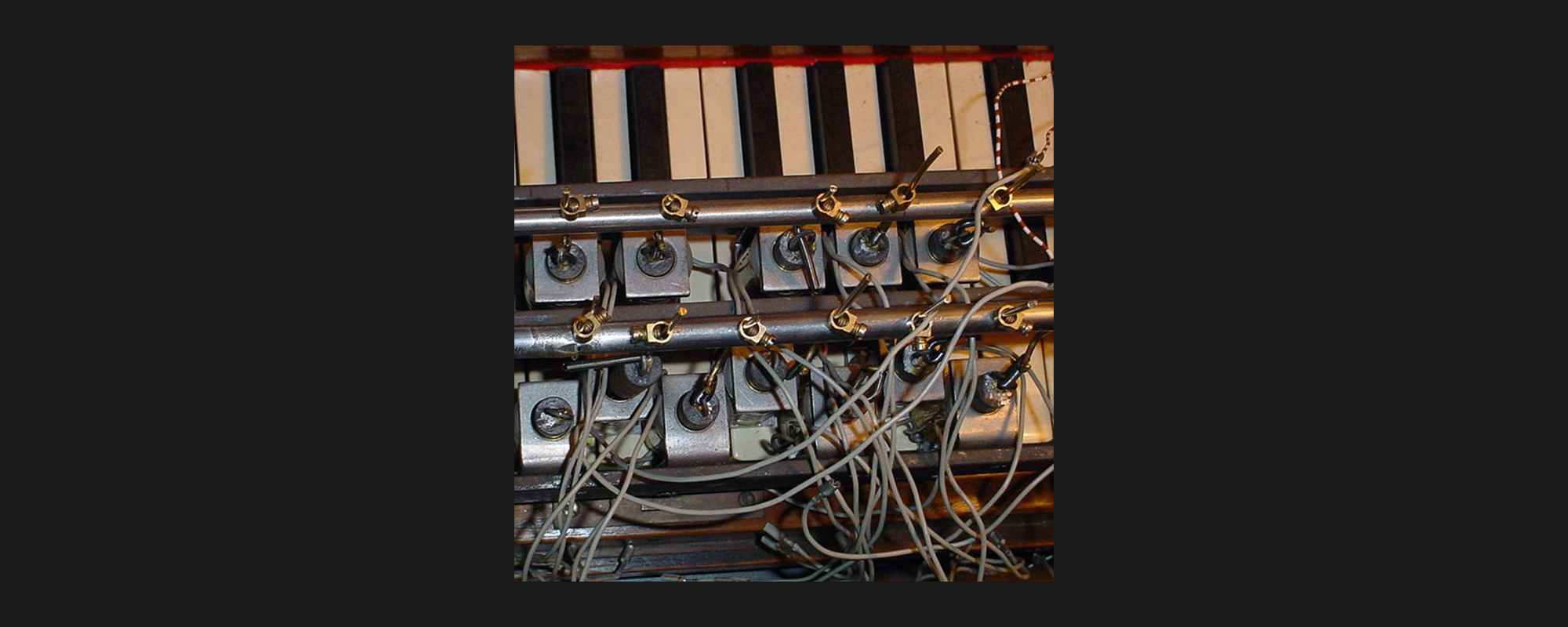
First experiments with robotic piano playing 2003.
Electronics
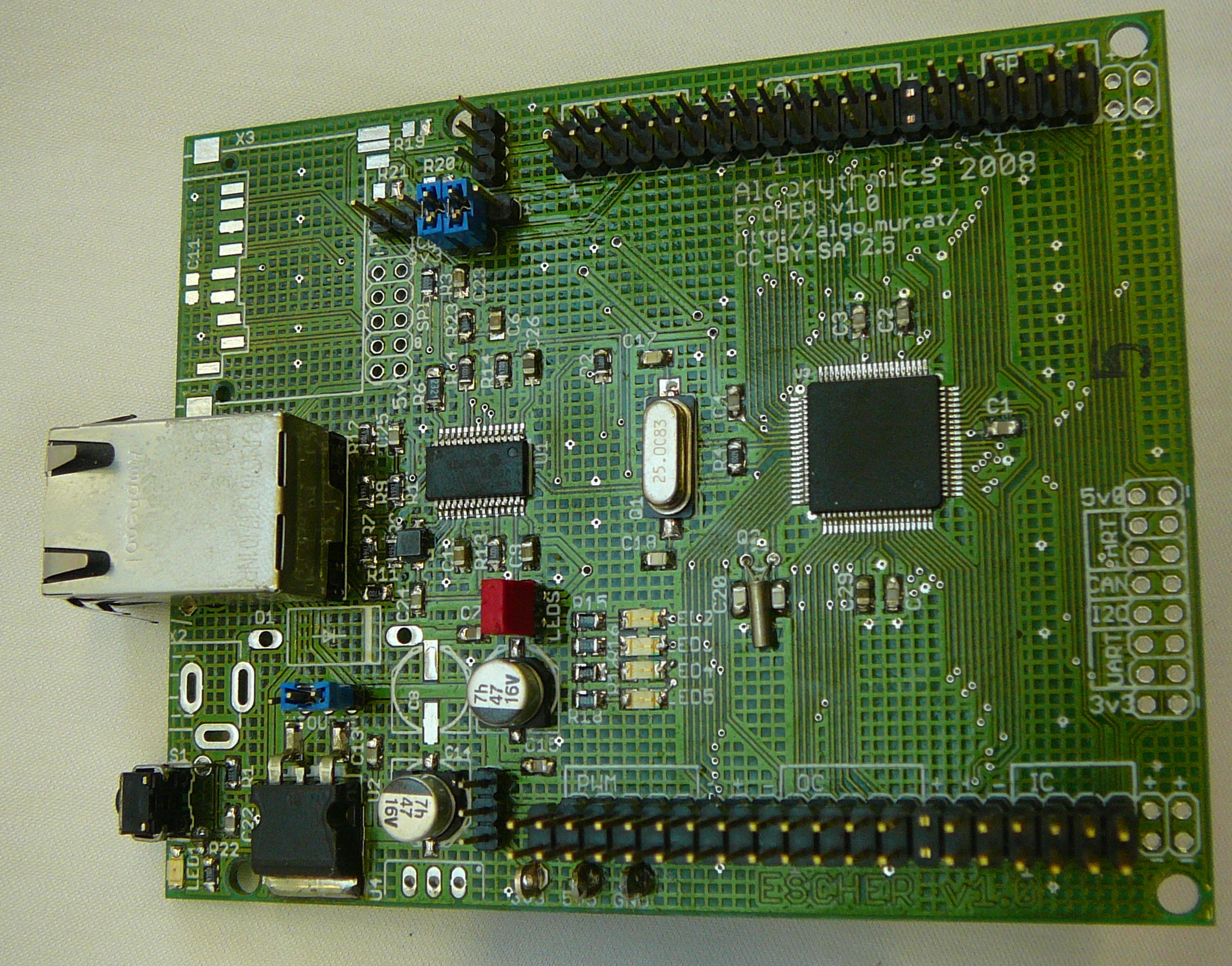
Escher Controller.
Escher Board
EscherFET
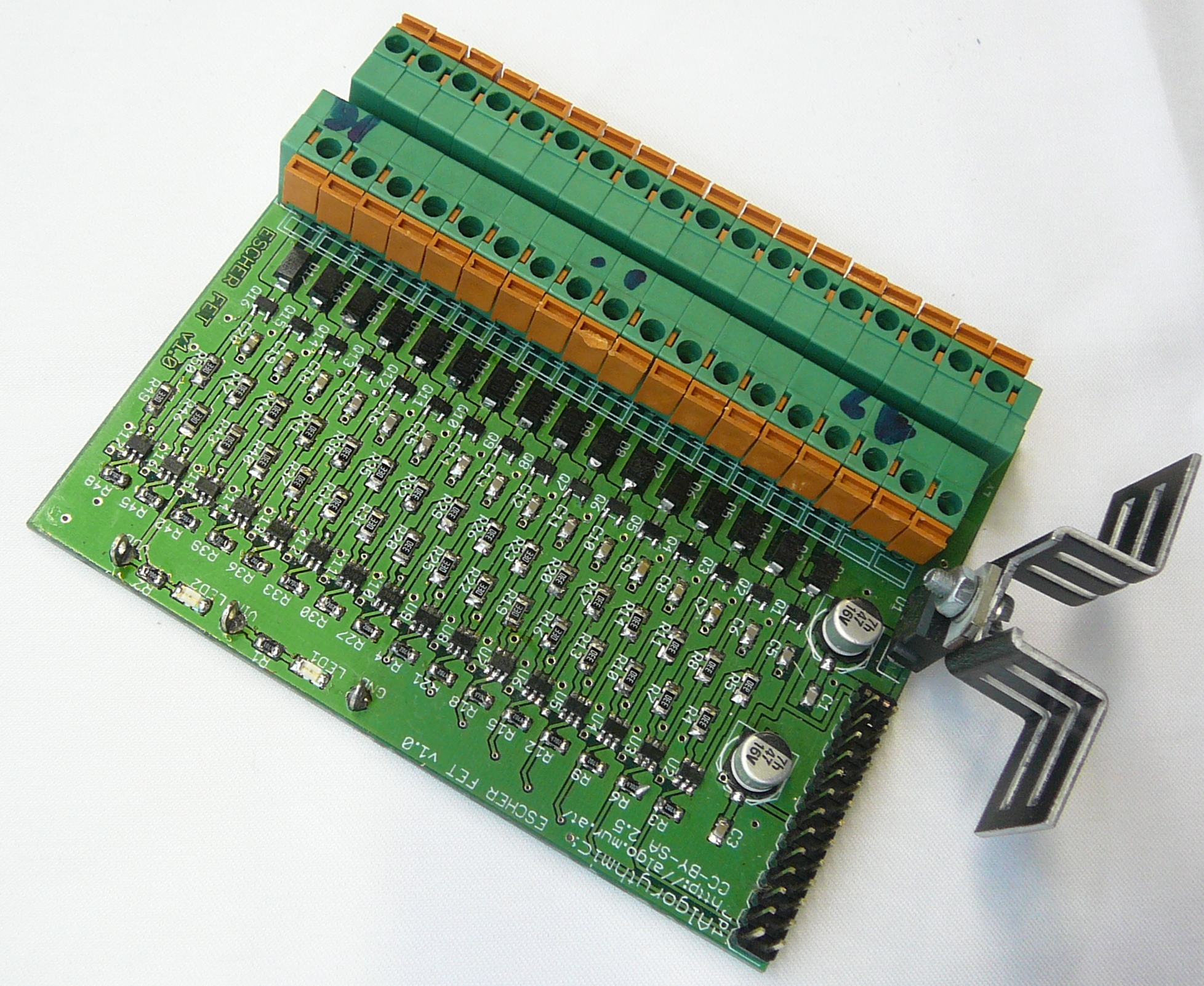
EscherFET Amplifier Board.
Solenoids
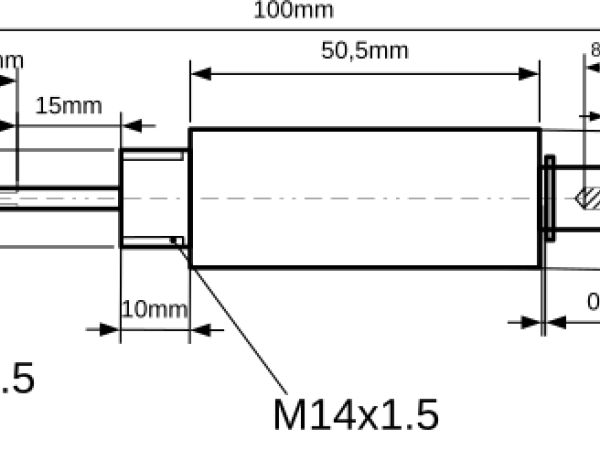
Solenoid constructed for series "Rhea".
Software
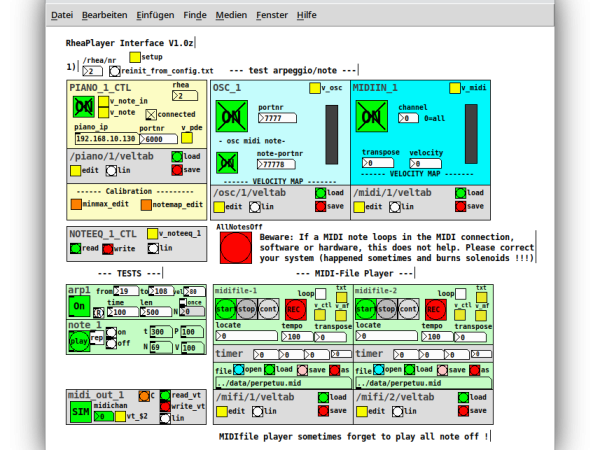
Rheaplayer, as Software Interface written in Puredata.
The player
The programming language Pure Data9 was used for the robot piano player's game to improve rapid prototyping, enable easy adaptation and integration into other projects, and ensure rapid expansion to meet new requirements. The software can also be used as a framework for other projects and runs on most operating systems, but preferably on Linux.
Escher Real-time Operating System
Outcome
Maschinenhalle #1
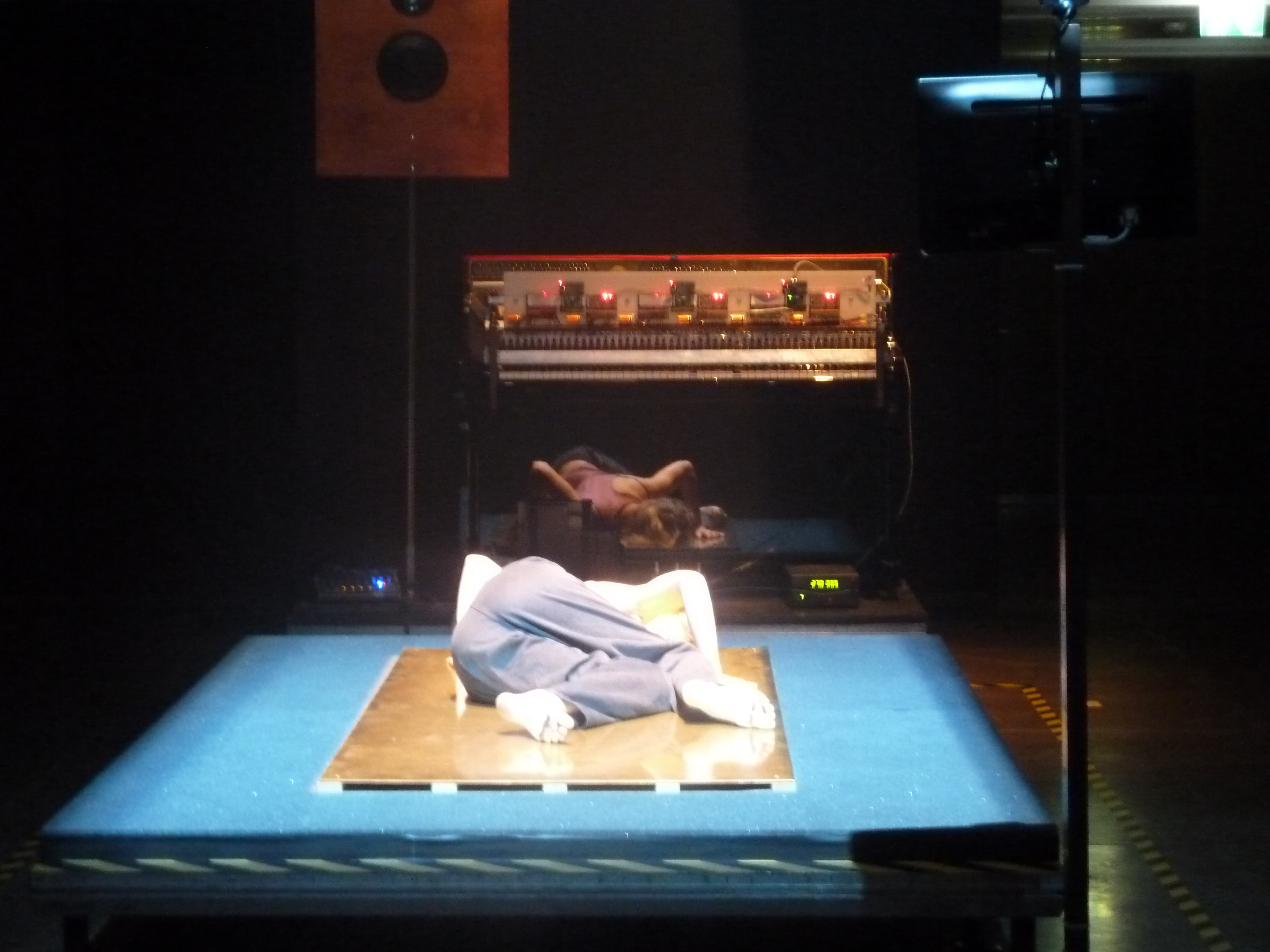
Installation at Ars Electronica Center Museum 2011.
Heptapiano
At the 2011 Ars Electronica Festival, seven automatic piano players from the Rhea series were arranged in a 20-meter diameter circle and played, using Ambisonics Algorithm, as an spaatial piano space. The commissioned work by the Ars Electronica Center Linz has used the 32nd trope of Josef Matthias Hauer, "Und die Wellen umspielen uns," as a base for self-replicating mutation algorithms embedded in noise waves of piano tones.10
Walking Piano - Automatenklavierspieler on wheels
Walking Piano is an automated piano player that can be pulled across public spaces. In the series "Resonant Interspaces" as part of the series "Music & Architecture" 2018, new instruments were developed, and autonomous devices were built to acoustically play musical (inter)spaces in architecture. Facades as scores, sounds to fill spaces, and microphones that stroll along the pavement.
Ballet Mecanique - 1925/2022
Conclusions and further outlook
- 1
Atelier Algorythmics Graz, http://algo.mur.at/
- 2
Denis Diderot, Entretien entre d’Alembert et Diderot (1769).
- 3
Prieberg, F.K., Musica ex machina: über das Verhältnis von Musik und Technik. (1960) Ullstein Verlag.
- 4
Peter Ablinger, "Phonorealism", online article: http://ablinger.mur.at/phonorealism.html, accessed 30.3.2013.
- 5
The Music Instrument Device Interface -file standard as serial control interface with about maximal one command per millisecond transmission rate.
- 6
Wikipedia. Trimpin — Wikipedia, the free encyclopedia. 2011; Online accessed 27-April-2011.
- 7
Based on PIC16F877 and a two-stage FET solenoid driver this circuit was also used in a lot of other artwork, see "algopic - algofet", http://algo.mur.at/projects/microcontroller/algopic/algopic
- 8
http://maschinenhalle.at/
- 9
M. Puckette. "Pure data", in Proceedings, International Computer Music Conference., 224–227. San Francisco, 1996.
- 10
Heptapiano 2011 URL: http://algo.mur.at/projects/autoklavierspieler/performances/heptapiano

Winfried Ritsch
Winfried Ritsch (born 1964, Tyrol) is an Associate Professor of Computer Music at the Institute for Electronic Music and Acoustics (IEM) at the University of Music and Performing Arts Graz and runs the ‘Klangatelier Algorythmics’. He studied electrical engineering and sound engineering at the Graz University of Technology and the former University of Music and Performing Arts Graz. In addition to his compositions and large media art installations, he has developed innovative artistic concepts and initiated media art laboratories and the artists' initiatives FOND, TONTO, mur.at and has realized art and music theatre productions. He has been honored with art prizes for his work as a composer, including the 1994 City of Graz Prize for Composition, the Max Brandt Prize for Composition in 1997, and the Andrzej Dobrowolski Composition Prize of the Province of Styria in 2020. He tours extensively with his experimental computer music and media art performances and media art installations, in particular with robot ensembles such as the ‘ensemble mècanique’, most recently realizing robotic exhibitions at Kunsthaus Graz 2019 and Museum Fernand Léger in Biot/France. For his artistic activities in the fields of radio art, sound art, and the realization of telematic art projects, he develops robotic musical instruments, and cybernetic models for generative and interactive music and acoustics as open-source projects and has been operating his net culture servers on the Internet since 1998.
Article topics
Article translations are machine translated and proofread.
Artikel von Winfried Ritsch
// Similar articles


